Toto
Computer Engineering and Artificial Intelligence student at HKUST
More than
the code.
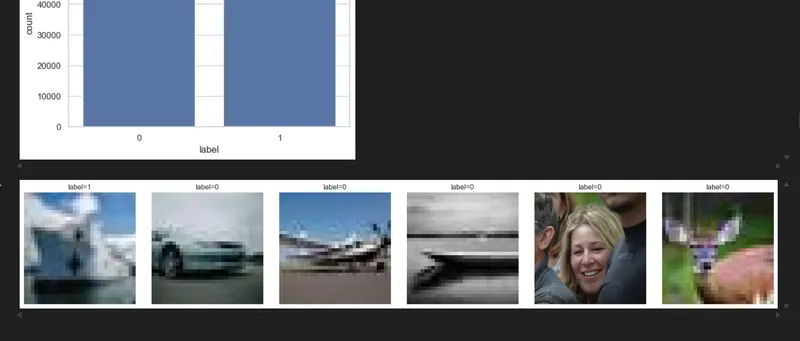
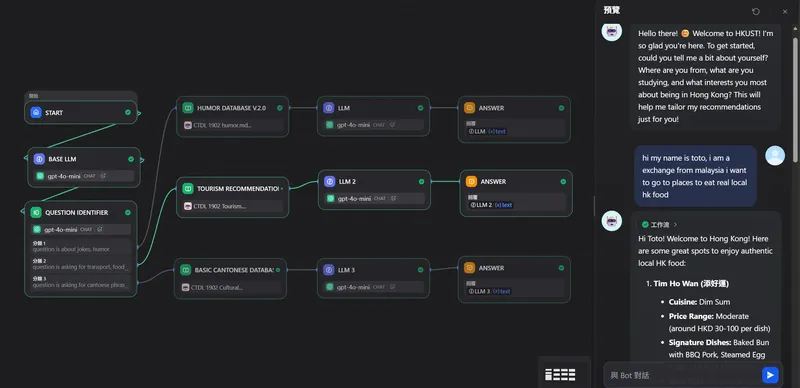
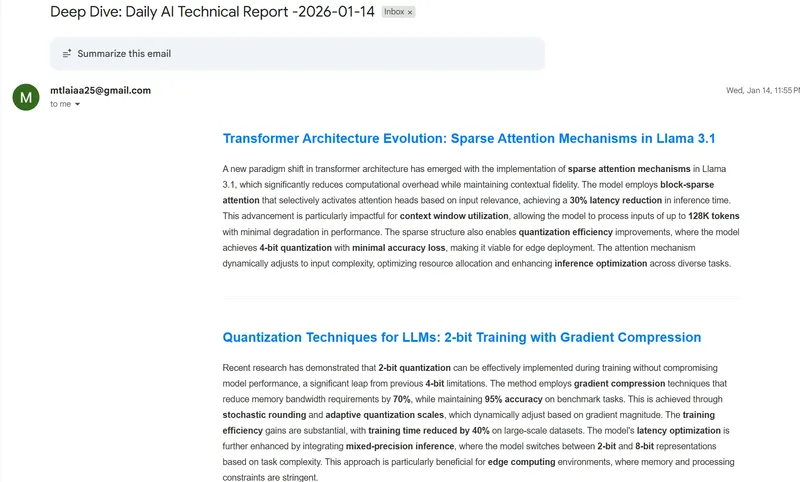
I'm Toto, a Computer Engineering and Artificial Intelligence student at HKUST. I love building things where hardware, intelligence, and people meet.
From training deep learning models to building robot cars or pitching sponsorships for a 200-member climbing society, I'm always looking at the bigger picture.
When I'm not coding, you'll find me leading the HKUST Sports Climbing Team as team captain. The same focus and problem-solving I use on the wall helps me tackle every technical challenge I face.
Selected
projects.


What I
bring.
Tailored for
your context.
Pick the role that fits best. I've broken down my CV into different versions so you can see exactly how my projects and skills map to your team's needs.
Available in PDF format.